- Acronym
- RESTORE
- Code
- PNRA18_00137
- Anno
- 2020
- Research area
- Marine science
- Specific research topic
- Robotica marina
- Region of interest
- Terra Nova Bay
- PI
- Gabriele Bruzzone
- PI establishment
- Consiglio Nazionale delle Ricerche - Istituto di Ingegneria del Mare
- Institutional website
- http://www.inm.cnr.it
- Other institutions and subjects involved
- CNR-ISP, CNR-ISMAR, CNR-Unità di Comunicazione, Istituto idrografico della Marina, Università di Venezia
- Consistency of the research team
- Project status
- In progress
- Main stations used
- MZS
- The project
RESTORE proposes the development of portable robotic technologies for 3D multi-parameter monitoring of marine ecosystems with a focus on the air-sea-ice, air-sea, sea-ice-sea-water-bottom, ice-sea-water-bottom, and sediment-water interfaces in the Ross Sea MPA in Antarctica. The RESTORE technology supports research activities on life in Antarctica, geology in Antarctica, and the effects of climate change on the Antarctic atmosphere through the study of microbial ecology and benthic habitat in transition regions, 3D mapping of the water column and seafloor hydrographic structures, and ocean-atmosphere exchanges. RESTORE will form a multi-parameter representation of the marine environment, allowing a holistic view of the ecology and atmospheric and oceanic dynamics in interface zones. The RESTORE robotic system is inspired by the POP ART (Portable Pelagic Autonomous Robotic Technology) concept and is based on the P2-ROV prototype, developed under the PNRA POLE project and its Proteus USSV evolution.
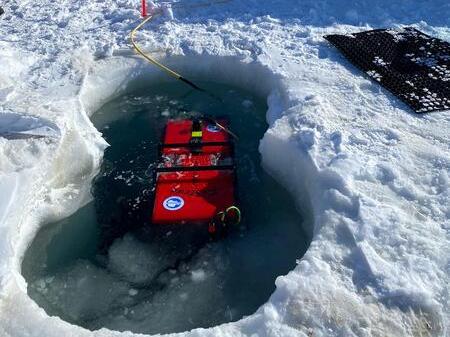
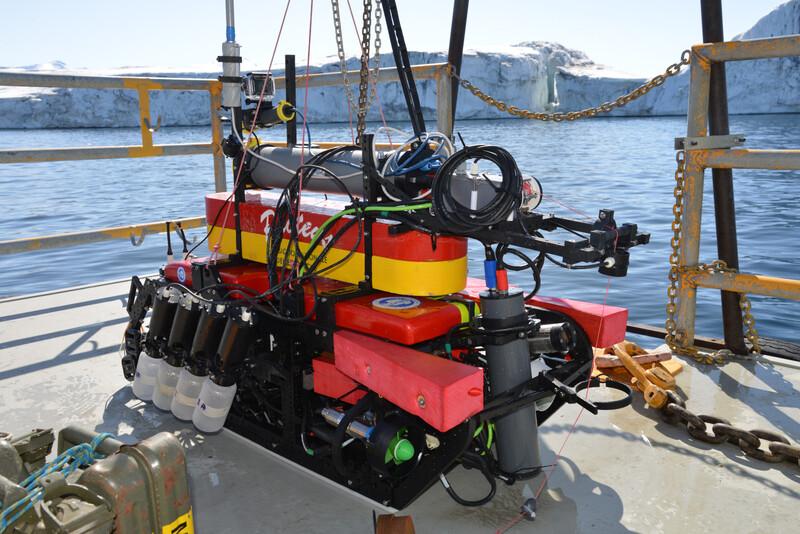
It is composed of modular, easily transportable mechanical blocks that can be assembled in situ to compose: (i) a P2-ROV prototype that can be put to sea through holes in the pack, capable of monitoring and sampling the submerged ice surface, water column, and seafloor; (ii) a pair of PROTEUS Unmanned Semi-Submersible Vehicles, capable of sampling the water surface and sub-surface, equipped with multi-parameter probes for air and water column characterization and acoustic instruments for seafloor characterization; (iii) a POP-ART Unmanned Surface Vehicle, resulting from the connection of two PROTEUS USSVs, equipped with a marine surface microlayer sampler. The RESTORE robotic system will be validated through field operations in the MPA regions of the Ross Sea
- Images
-
-




















-
- Motivation, importance of research
- Objectives of the proposal
- Activities carried out and results achieved
- Products