- Acronimo
- RESTORE
- Codice
- PNRA18_00137
- Anno
- 2020
- Area di ricerca
- Marine science
- Tematica specifica di ricerca
- Robotica marina
- Regione di interesse
- Terra Nova Bay
- PI
- Gabriele Bruzzone
- Istituzione PI
- Consiglio Nazionale delle Ricerche - Istituto di Ingegneria del Mare
- Sito web istituzionale
- http://www.inm.cnr.it
- Altre Istituzioni e soggetti coinvolti
- CNR-ISP, CNR-ISMAR, CNR-Unità di Comunicazione, Istituto idrografico della Marina, Università di Venezia
- Consistenza del team ricerca
- Stato progetto
- In corso
- Stazioni principali usate
- MZS
- Il progetto
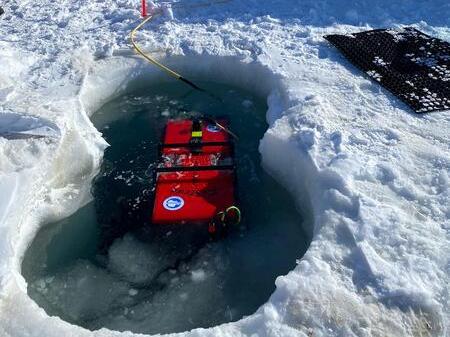
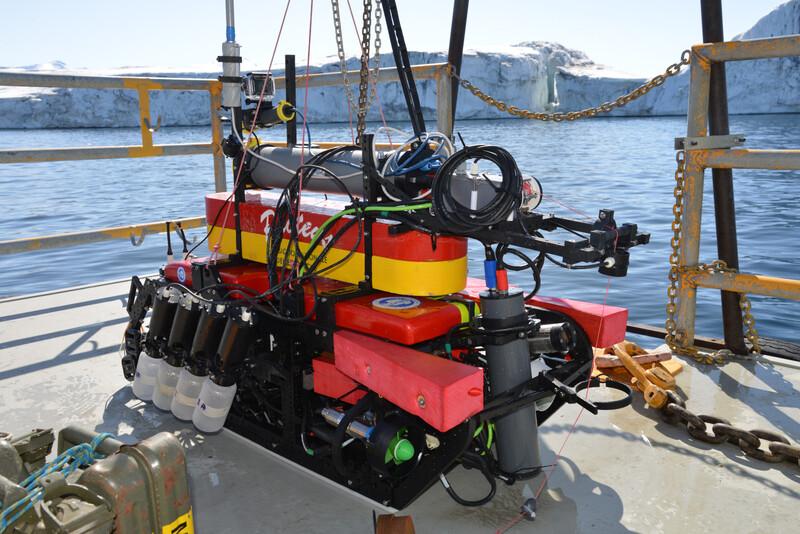
Il progetto RESTORE si prefigge lo sviluppo di tecnologie robotiche portatili per il monitoraggio multi-parametrico 3D di ecosistemi marini con particolare attenzione alle interfacce aria-mare-ghiaccio, aria-mare, ghiaccio marino-acqua marina-fondale, ghiaccio-acqua marina-fondale, sedimento-acqua nella MPA del Mare di Ross in Antartide. La tecnologia impiegata nel progetto RESTORE consente di supportare le attività di ricerca sulla vita in Antartide, la geologia in Antartide e sugli effetti dei cambiamenti climatici sull'atmosfera antartica, mediante lo studio dell'ecologia microbica e dell'habitat bentonico nelle regioni di transizione, della mappatura 3D della colonna d'acqua e delle strutture idrografiche del fondale e degli scambi tra l'oceano e l'atmosfera. Uno degli scopi principali del progetto RESTORE è fornire uno strumento che consenta di raccogliere dati per effettuare una rappresentazione multi-parametrica dell'ambiente marino, permettendo una visione olistica dell'ecologia e delle dinamiche atmosferiche e oceaniche nelle zone di interfaccia. Il sistema robotico RESTORE si ispira al concetto POP ART (Tecnologia robotica autonoma pelagica portatile) e si basa sul prototipo P2-ROV, sviluppato nell'ambito del progetto PNRA POLE e sulla sua evoluzione Proteus USSV. E' composto da blocchi meccanici modulari, facilmente trasportabili, che possono essere assemblati in situ per comporre: i) un prototipo P2-ROV che può essere messo a mare tramite fori nel pack, in grado di monitorare e campionare la superficie sommersa del ghiaccio, la colonna d'acqua, e il fondale; ii) un paio di Veicoli Semi-Sommergibili senza equipaggio PROTEUS, in grado di campionare la superficie e la sub-superficie dell'acqua, dotati di sonde multiparametriche per la caratterizzazione della colonna d'aria e d'acqua e di strumenti acustici per la caratterizzazione del fondale; iii) un POP-ART Unmanned Surface Vehicle, risultante dal collegamento di due PROTEUS USSV, equipaggiato con un campionatore del microstrato superficiale marino. Il sistema robotizzato RESTORE è stato utilizzato con successo sul campo nelle regioni dell'MPA del Mare di Ross nel corso della XXXVIII Spedizione in Antartide.
- Immagini
-
-




















-
- Motivazione, importanza della ricerca
- Obiettivi della proposta
- Attività svolta e risultati raggiunti
- Prodotti